Arduino CNC Shield v3.0 เป็นโล่ยอดนิยมที่ออกแบบมาเพื่อลดความซับซ้อนของการควบคุมเครื่องซีเอ็นซีเช่นเครื่องพิมพ์ 3 มิติเครื่องตัดเลเซอร์และเครื่องกัด จับคู่กับไดรเวอร์มอเตอร์ Arduino และ Stepper ช่วยให้สามารถควบคุมแกนหลายแกนได้อย่างแม่นยำ ในบทช่วยสอนนี้เราจะแนะนำคุณเกี่ยวกับการตั้งค่าและการใช้งานของ CNC Shield v3.0 กับ Arduino
สิ่งที่คุณต้องการ
- Arduino Board (เช่น UNO)
- CNC Shield v3.0
- ไดรเวอร์มอเตอร์ Stepper (เช่น A4988 หรือ DRV8825)
- มอเตอร์สเต็ปเปอร์
- แหล่งจ่ายไฟภายนอก (12V-36V สำหรับมอเตอร์)
- สายจัมเปอร์ (ไม่บังคับ)
- เฟิร์มแวร์ Grbl (เฟิร์มแวร์ CNC โอเพนซอร์ซ)
- คอมพิวเตอร์ที่ติดตั้ง Arduino IDE
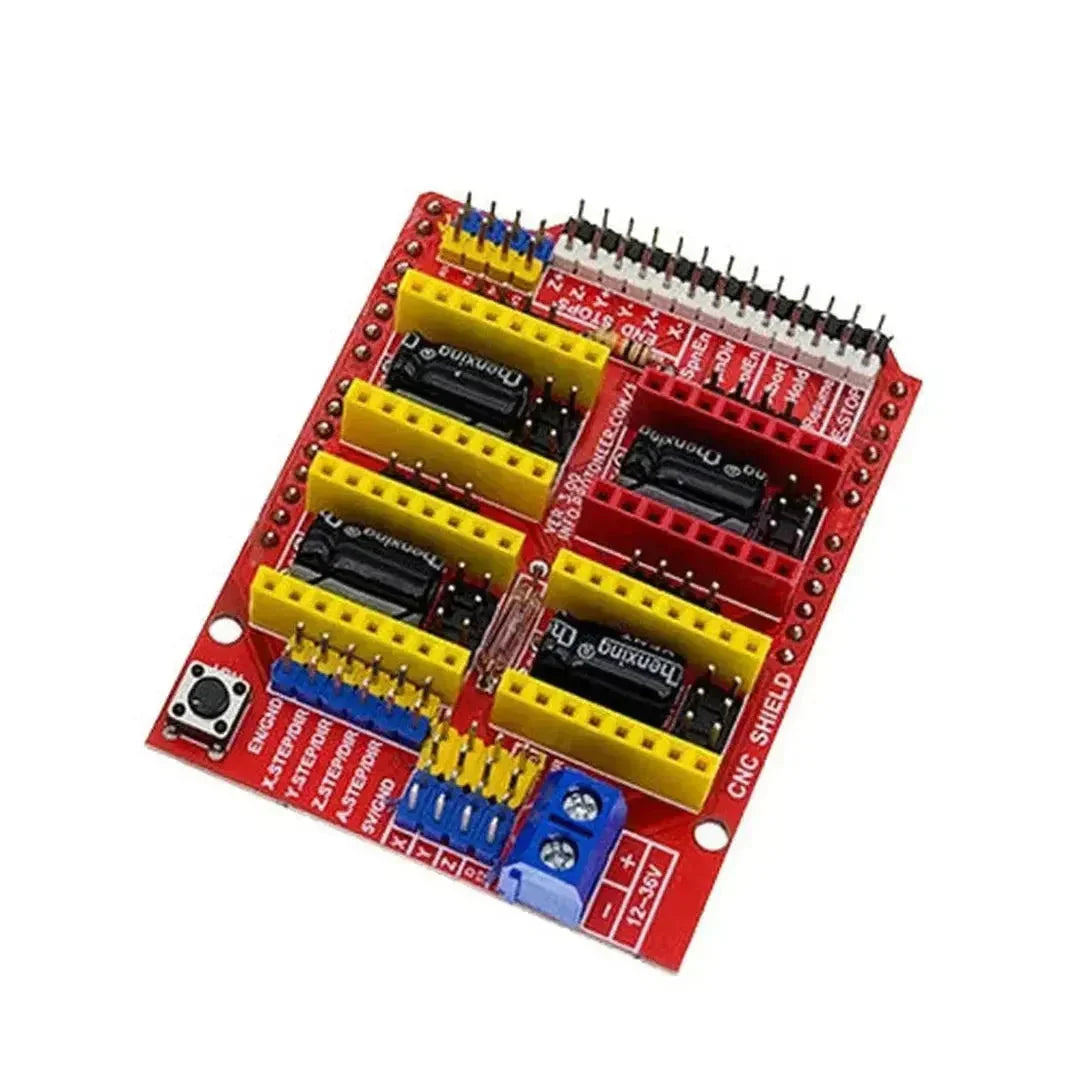
ขั้นตอนที่ 1: ทำความเข้าใจกับ CNC Shield v3.0
CNC Shield V3.0 ได้รับการออกแบบมาเพื่อความเข้ากันได้กับ Arduino UNO และรองรับ GRBL ซึ่งเป็นเฟิร์มแวร์โอเพนซอร์ซสำหรับควบคุมเครื่อง CNC คุณสมบัติที่สำคัญ ได้แก่ :
- รองรับสูงสุด 4 แกน (x, y, z, a)
- รองรับ microstepping ผ่านการกำหนดค่าไดรเวอร์มอเตอร์ Stepper
- พินสำหรับสวิตช์ จำกัด และปุ่มหยุดฉุกเฉิน
- ส่วนหัวสำหรับไดรเวอร์มอเตอร์ Stepper (A4988 หรือ DRV8825)
เลย์เอาต์ CNC Shield v3.0
- เอาท์พุทมอเตอร์สเต็ป: เชื่อมต่อมอเตอร์สเต็ปเปอร์ของคุณเข้ากับส่วนหัว x, y, z และส่วนหัว
- สล็อตไดรเวอร์: ติดตั้งไดรเวอร์มอเตอร์สเต็ปเปอร์ (เช่น A4988) ลงใน X, Y, Z และช่อง
- จำกัด อินพุตสวิตช์: เชื่อมต่อสวิตช์ขีด จำกัด กับพินที่สอดคล้องกัน
- อินพุตพลังงาน: ใช้แหล่งจ่ายไฟภายนอก (12V-36V) สำหรับมอเตอร์
ขั้นตอนที่ 2: ประกอบโล่
-
ติดตั้งไดรเวอร์มอเตอร์ Stepper:
- ใส่ไดรเวอร์มอเตอร์สเต็ปแต่ละตัวลงในสล็อตที่มีป้ายกำกับ X, Y, Z และ A. ตรวจสอบให้แน่ใจว่าการวางแนวตรงกับแผนภาพที่มาพร้อมกับโล่ (โดยปกติจะมีโพเทนชิออมิเตอร์หันหน้าไปทาง)
- ติดฮีทซิงค์กับชิปคนขับเพื่อการกระจายความร้อนที่ดีขึ้น
-
ตั้งค่า microstepping:
- ใช้จัมเปอร์บนโล่เพื่อกำหนดค่า microstepping สำหรับแต่ละแกน อ้างถึงแผ่นข้อมูลของไดรเวอร์สำหรับการกำหนดค่า microstepping (เช่น 1/16 หรือ 1/32 ขั้นตอน)
-
เชื่อมต่อมอเตอร์สเต็ป:
- แนบสายไฟมอเตอร์สเต็ปเปอร์เข้ากับ X, Y, Z และ A เอาต์พุตบนโล่
-
แหล่งจ่ายไฟ:
- เชื่อมต่อแหล่งจ่ายไฟภายนอกเข้ากับอินพุตพลังงานของโล่ (12V-36V) ตรวจสอบให้แน่ใจว่ามอเตอร์ของคุณเข้ากันได้กับแรงดันไฟฟ้า
-
แนบกับ Arduino:
- วาง CNC Shield v3.0 ไว้ด้านบนของ Arduino Uno จัดตำแหน่งพิน
ขั้นตอนที่ 3: ติดตั้งเฟิร์มแวร์ Grbl บน Arduino
-
ดาวน์โหลดเฟิร์มแวร์ Grbl:
- เยี่ยมชมพื้นที่เก็บข้อมูล GRBL GitHub อย่างเป็นทางการ: GRBL GITHUB.
- ดาวน์โหลดรุ่นล่าสุด
-
ติดตั้งไลบรารี GRBL ใน Arduino IDE:
- เปิด Arduino IDE
- ไป ร่าง > รวมห้องสมุด > เพิ่ม. ZIP Library.
- เลือกโฟลเดอร์ GRBL ที่ดาวน์โหลดมา
-
อัปโหลด GRBL ไปยัง Arduino:
- เปิด Arduino IDE แล้วเลือก ไฟล์ > ตัวอย่าง > GRBL > กรอง.
- เลือกที่ถูกต้อง กระดาน และ ท่าเรือ ภายใต้ เครื่องมือ เมนู.
- คลิก อัพโหลด เพื่อโหลด Grbl ลงใน Arduino
ขั้นตอนที่ 4: กำหนดค่าการตั้งค่า GRBL
-
เชื่อมต่อกับ GRBL:
- ใช้เครื่องมือการสื่อสารแบบอนุกรมเช่น ARDUINO Serial Monitor หรือซอฟต์แวร์ควบคุม CNC เฉพาะ (เช่นผู้ส่ง GCODE Universal)
- ตั้งค่าอัตราการรับส่งข้อมูลเป็น
115200.
-
ทดสอบ GRBL:
- ส่งคำสั่ง
$$เพื่อดูการตั้งค่า GRBL ปัจจุบัน - ปรับการตั้งค่าเช่นขั้นตอนต่อมิลลิเมตรอัตราการป้อนและการเร่งความเร็วตามต้องการ ตัวอย่างเช่น:
$100=250.0 (X-axis steps/mm) $101=250.0 (Y-axis steps/mm) $102=250.0 (Z-axis steps/mm)
- ส่งคำสั่ง
-
เปิดใช้งานสวิตช์ จำกัด (ไม่บังคับ):
- เชื่อมต่อสวิตช์ขีด จำกัด เข้ากับโล่และเปิดใช้งานในการตั้งค่า GRBL:
$21=1 (Enable hard limits) $22=1 (Enable homing)
- เชื่อมต่อสวิตช์ขีด จำกัด เข้ากับโล่และเปิดใช้งานในการตั้งค่า GRBL:
ขั้นตอนที่ 5: ทดสอบโล่ CNC
-
เปิดโปรแกรมควบคุม CNC:
- ใช้ซอฟต์แวร์เช่น Universal GCODE SENDER (UGS) เพื่อควบคุมโล่ CNC
-
ย้ายมอเตอร์:
- ใช้การควบคุมด้วยตนเองในซอฟต์แวร์เพื่อย้ายแกน x, y และ z ตรวจสอบว่ามอเตอร์สเต็ปเปอร์ตอบสนองอย่างถูกต้อง
-
โหลดไฟล์ G-Code:
- ทดสอบการตั้งค่าโดยการโหลดไฟล์ G-Code ตัวอย่างและเรียกใช้ในซอฟต์แวร์
การแก้ไขปัญหา
-
Stepper Motors ไม่เคลื่อนไหว:
- ตรวจสอบการวางแนวของคนขับและตรวจสอบให้แน่ใจว่าจัมเปอร์ถูกตั้งค่าสำหรับการ microstepping
- ตรวจสอบว่าแหล่งจ่ายไฟภายนอกเชื่อมต่อและใช้งานได้
-
การเคลื่อนไหวที่ผิดปกติ:
- ตรวจสอบการเชื่อมต่อมอเตอร์และลดการตั้งค่าการเร่งความเร็วใน GRBL
-
ไดรเวอร์ความร้อนสูงเกินไป:
- ตรวจสอบให้แน่ใจว่าติดตั้งฮีทซิงค์ที่เหมาะสมและพิจารณาใช้พัดลมระบายความร้อน
แอปพลิเคชันของ CNC Shield v3.0
- เราเตอร์ DIY CNC
- เครื่องพิมพ์ 3 มิติ
- เครื่องแกะสลักเลเซอร์
- คนพล็อตเตอร์
บทสรุป
คุณได้ตั้งค่า Arduino CNC Shield v3.0 สำเร็จเพื่อใช้กับ GRBL โล่นี้ทำให้ง่ายต่อการควบคุมมอเตอร์สเต็ปและสร้างเครื่อง CNC ของคุณเอง ทดลองกับการกำหนดค่าที่แตกต่างกันและเริ่มนำโครงการ CNC ของคุณมาใช้ชีวิต!














1 ความคิดเห็น
Do you have any information regarding how to wire and configure system for dual end stop limit installations?