



KY-040旋转编码器是用于测量角位置或旋转的机械装置。它通常用于机器人技术中的音量控件,菜单导航和位置跟踪。本教程将指导您与Arduino连接和使用KY-040旋转编码器。
你需要什么
- KY-040旋转编码器模块
- Arduino董事会(例如Uno,Mega,Nano)
- 面包板和跳线电线
- 安装了带有Arduino IDE的计算机
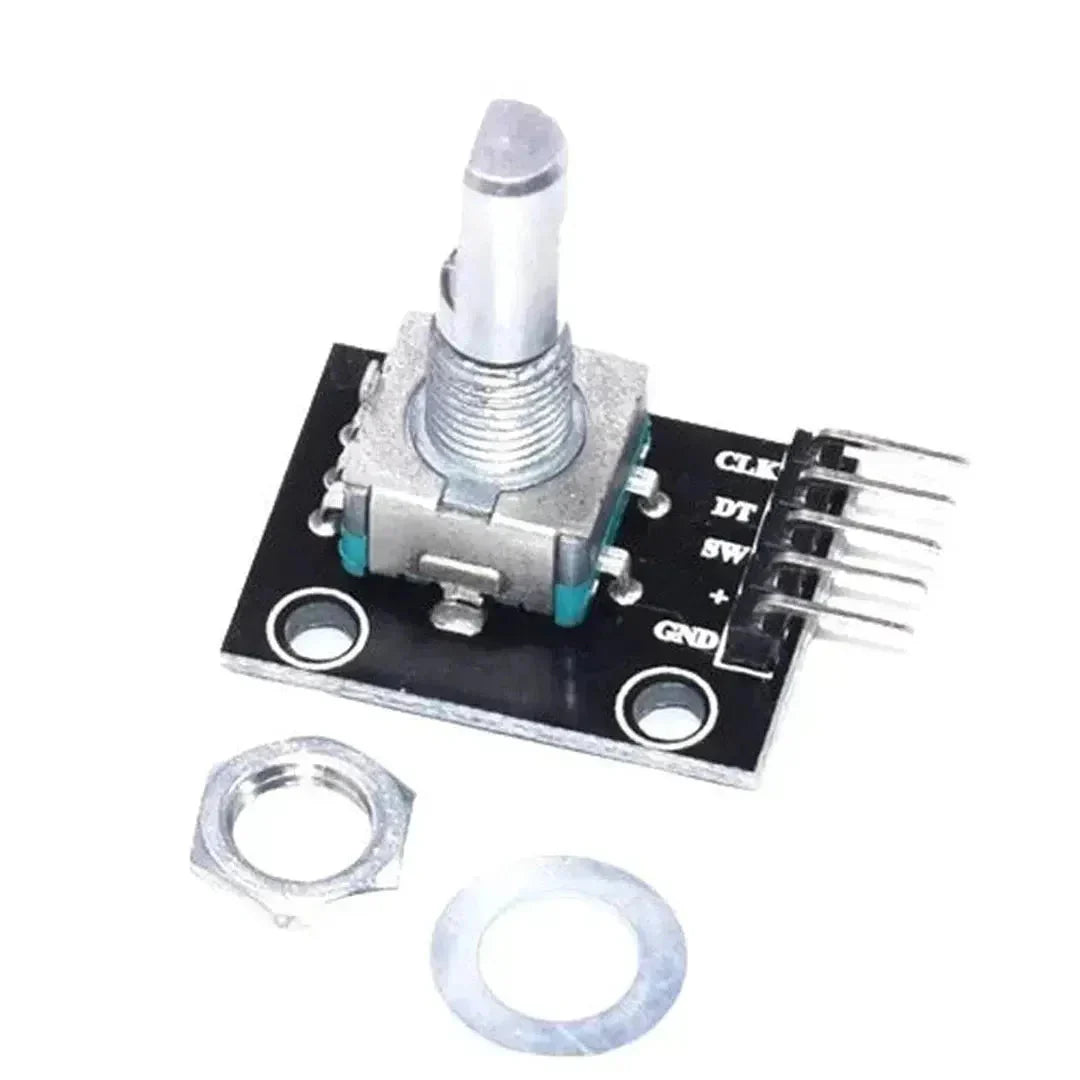
步骤1:了解KY-040旋转编码器
KY-040编码器由一个旋转拨盘组成,该旋转时会在旋转时产生脉冲。它还包括一个内置的按钮。
KY-040 PINOUT
| 别针 | 功能 |
|---|---|
| gnd | 地面 |
| + | 电源(5V) |
| clk | 时钟脉冲信号 |
| DT | 数据脉冲信号 |
| SW | 按钮信号 |
步骤2:将KY-040接线到Arduino
这是将KY-040连接到Arduino Uno的方法:
| KY-040针 | Arduino Pin |
|---|---|
| gnd | gnd |
| + | 5V |
| clk | 引脚2 |
| DT | 引脚3 |
| SW | 引脚4 |
步骤3:上传代码
以下示例代码读取旋转编码器的旋转并检测按钮按下:
#define CLK 2 // Clock pin
#define DT 3 // Data pin
#define SW 4 // Switch pin
int counter = 0; // Counter to track rotation
int currentStateCLK;
int lastStateCLK;
void setup() {
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
pinMode(SW, INPUT_PULLUP); // Internal pull-up for the button
Serial.begin(9600);
// Read the initial state of the CLK pin
lastStateCLK = digitalRead(CLK);
Serial.println("KY-040 Rotary Encoder Test");
}
void loop() {
// Read the current state of the CLK pin
currentStateCLK = digitalRead(CLK);
// If the state has changed, the encoder has rotated
if (currentStateCLK != lastStateCLK) {
// Check the DT pin to determine the rotation direction
if (digitalRead(DT) != currentStateCLK) {
counter++;
} else {
counter--;
}
Serial.print("Counter: ");
Serial.println(counter);
}
// Save the last state of CLK
lastStateCLK = currentStateCLK;
// Check if the button is pressed
if (digitalRead(SW) == LOW) {
Serial.println("Button pressed!");
delay(200); // Debounce delay
}
}
步骤4:测试设置
- 通过USB将Arduino连接到您的计算机。
- 打开Arduino IDE并选择正确的 木板 和 港口 在 工具 菜单。
- 单击上传代码 上传.
- 打开串行监视器(工具 > 串行监视器)并将波特率设置为
9600. - 旋转编码器并按下按钮。观察串行显示器中的计数器和按钮按消息。
KY-040旋转编码器的应用
- 音量或亮度控制
- 菜单导航
- 电机位置跟踪
- 机器人技术和自动化系统
故障排除
- 无旋转检测: 检查CLK和DT接线,并确保PIN与代码匹配。
- 不稳定的读数: 添加一个小的调试延迟以稳定编码器信号。
-
未检测到按钮: 验证SW引脚已正确连接并使用
INPUT_PULLUP模式。
结论
您已成功将KY-040旋转编码器与Arduino连接在一起。这个多功能模块使您可以在项目中添加旋转跟踪和按钮功能。在不同的应用程序中尝试使用它,例如构建自定义控件或在系统中导航菜单!



































































































































