
这 VL53L0X 是一种飞行时间(TOF)传感器,使用激光技术准确地测量距离。它通常用于机器人技术,自动化和障碍物检测应用中。本指南将带您进行设置,并使用Raspberry Pi使用VL53L0X。
你需要什么
- 覆盆子pi (任何具有GPIO支持的模型,例如PI 3,PI 4)
- VL53L0X距离传感器模块
- 面包板和跳线电线
- 安装了Python 在覆盆子pi上
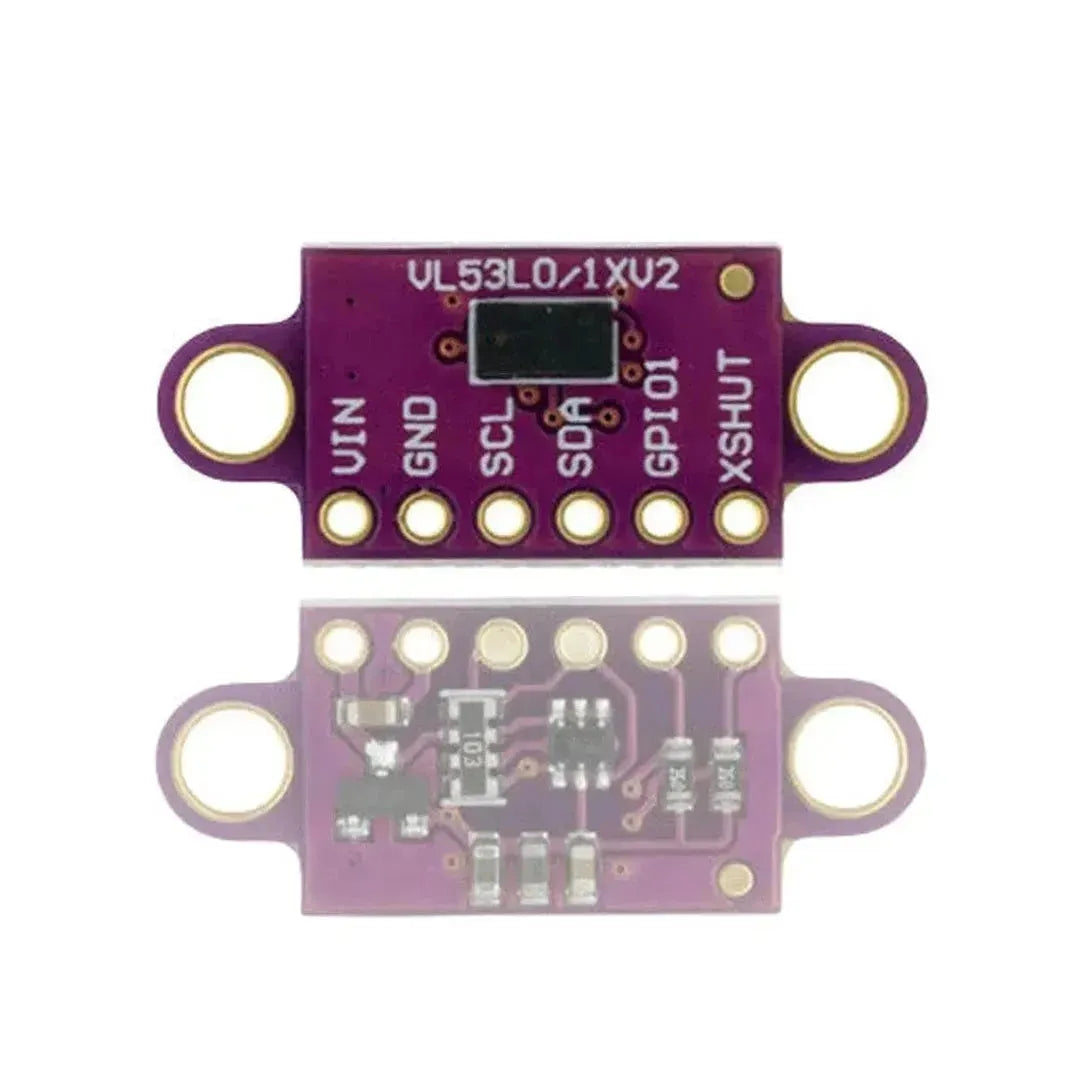
步骤1:将VL53L0X接线到Raspberry Pi
这 VL53L0X通过I2C通信,因此我们需要将其连接到Raspberry Pi的I2C引脚。
连接
| VL53L0X引脚 | 覆盆子Pi Pin |
|---|---|
| VCC | 3.3V(引脚1) |
| gnd | 地面(引脚6) |
| SDA | SDA(引脚3,GPIO2) |
| SCL | SCL(引脚5,GPIO3) |
| Xshut(可选) | 任何GPIO(启用/禁用传感器) |
步骤2:在Raspberry Pi上启用I2C
由于VL53L0X通过I2C通信,因此我们需要启用I2C接口。
-
打开Raspberry Pi配置工具:
sudo raspi-config -
导航到 接口选项> I2C 并启用它。
-
重新启动覆盆子Pi:
sudo reboot -
通过运行来验证传感器是否检测到:
sudo i2cdetect -y 1VL53L0X应该出现在 0x29.
步骤3:安装所需库
- 更新Raspberry Pi的包装列表:
sudo apt update && sudo apt upgrade -y - 安装必要的Python库:
sudo apt install -y python3-pip i2c-tools python3-smbus pip3 install adafruit-circuitpython-vl53l0x
步骤4:从VL53L0X读取距离数据
这是一个使用VL53L0X传感器测量距离的Python脚本。
Python代码示例
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C and VL53L0X sensor
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
try:
while True:
distance = vl53.range # Read distance in millimeters
print(f"Distance: {distance} mm")
time.sleep(1)
except KeyboardInterrupt:
print("Exiting...")
步骤5:VL53L0X的应用
- 障碍物检测 - 用于机器人技术和自动驾驶汽车来检测物体。
- 接近感应 - 自动化门,安全系统或物联网应用程序。
- 水平测量 - 监视容器中的液体水平。
- 手势识别 - 无触摸界面的轨道移动。
故障排除
-
设备未检测到(
i2cdetect不显示0x29)- 检查接线 SDA/SCL 别针。
- 确保在Raspberry Pi上启用I2C接口。
-
不准确的读数
- 确保传感器没有阻塞。
- 避免反光表面,这可能会导致不正确的读数。
-
多个VL53L0X传感器
- 使用 xshut 引脚将不同的I2C地址分配给多个VL53L0X传感器。
结论
VL53L0X是一个强大的 基于激光的距离传感器 这与覆盆子Pi无缝集成。通过遵循本指南,您可以准确测量机器人技术,自动化和物联网项目的距离。尝试不同的应用程序以解锁其全部潜力! 🚀