MCP2515是一个广泛用于汽车和工业通信的CAN(控制器网络)。它使Arduino能够与基于CAN的系统进行交互,以便有效地发送和接收数据。本教程将指导您通过Arduino设置和使用MCP2515模块。
你需要什么
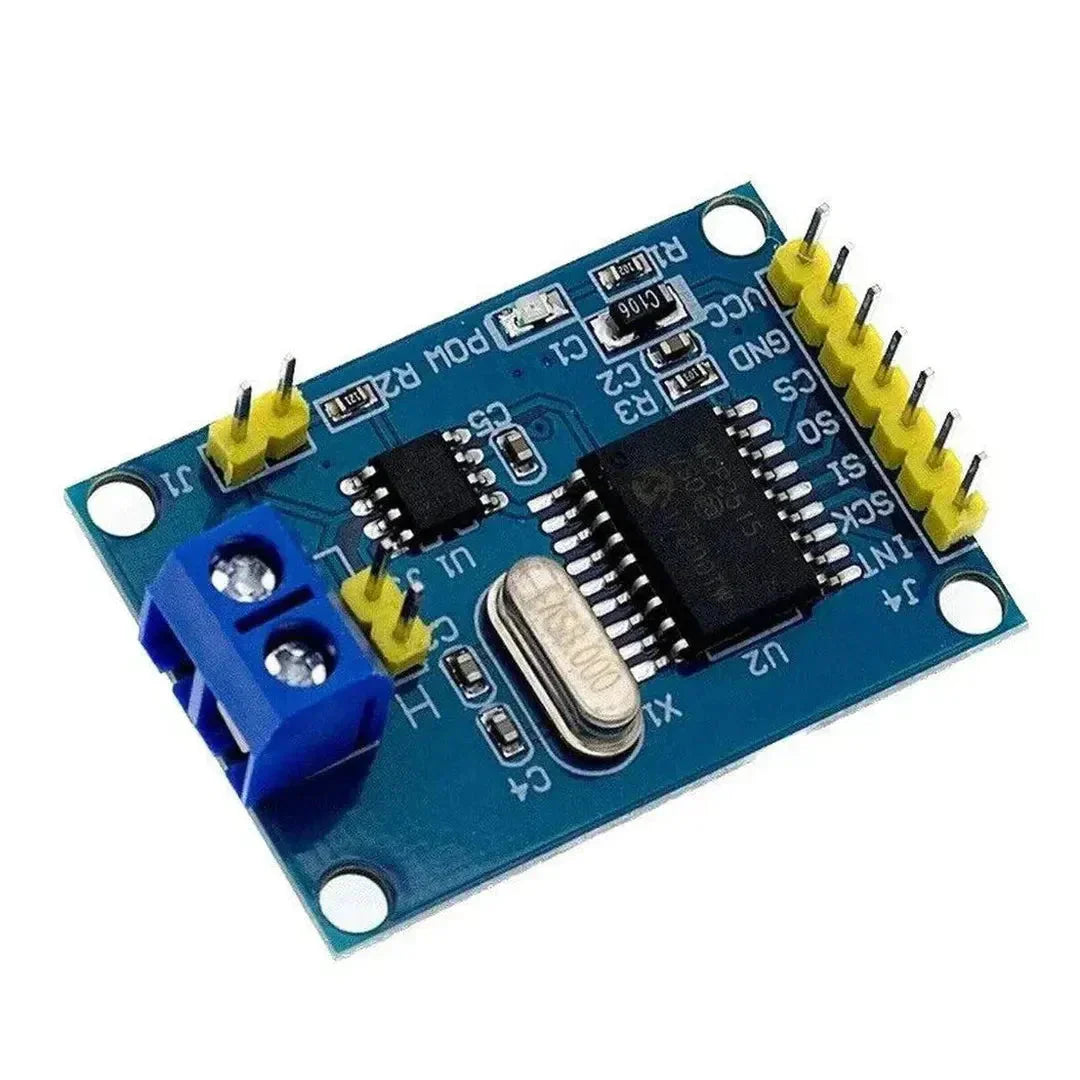
- MCP2515 CAN BUS模块
- Arduino董事会(例如Uno,Mega,Nano)
- CAN-BUS兼容设备或其他MCP2515模块
- 跳线
- 面包板(可选)
- 安装了带有Arduino IDE的计算机
步骤1:了解MCP2515模块
MCP2515模块使用MCP2515 CAN IC和TJA1050 CAN收发器。该模块通过SPI接口与Arduino通信。
MCP2515 PINOUT
| 别针 | 功能 |
|---|---|
| VCC | 电源(5V) |
| gnd | 地面 |
| CS | 芯片选择 |
| 所以 | SPI数据输出 |
| SI | SPI数据输入 |
| SCK | SPI时钟 |
| int | 中断输出 |
步骤2:将MCP2515接线到Arduino
以下是将MCP2515模块连接到Arduino Uno的接线指南:
| MCP2515 PIN | Arduino Pin |
|---|---|
| VCC | 5V |
| gnd | gnd |
| CS | 引脚10 |
| 所以 | 引脚12 |
| SI | 引脚11 |
| SCK | 引脚13 |
| int | 引脚2 |
笔记: 对于其他Arduino板,请确保SPI引脚对应于您的特定板的引脚。
步骤3:安装所需的库
这 MCP_CAN 库简化了与MCP2515模块的交互。
安装MCP_CAN库的步骤:
- 打开Arduino IDE。
- 去 草图 > 包括库 > 管理库.
- 在图书馆管理器中搜索“ MCP_CAN”。
- 点击 安装.
步骤4:上传代码
发射器代码(在CAN BUS上发送数据):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
接收器代码(从CAN BUS读取数据):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
步骤5:测试设置
- 如第2步中所述,将MCP2515模块连接到您的Arduino。
- 将发射器代码上传到一个Arduino,将接收器代码上传到另一个Arduino。
- 连接两个MCP2515模块的CAN_H和CAN_L引脚,以建立CAN BUS。
- 在Arduinos上打开串行监视器,并将波特率设置为
115200. - 在接收器Arduino上,您应该看到发射器Arduino发送的消息。
故障排除
- 没有收到的数据: 检查模块之间的CAN_H和CAN_L连接。
- 初始化失败: 确保SPI连接和CS引脚与您的设置匹配。
- 不稳定的交流: 验证两个模块是否使用相同的波特率(在此示例中为500 kbps)。
MCP2515 CAN BUS模块的应用
- 车辆诊断(OBD-II)
- 工业自动化系统
- 机器人通信
- 带有CAN总线网络的物联网设备
结论
您已经成功地设置了使用Arduino发送和接收数据的MCP2515 CAN CAN BUS模块。对于需要在罐头总线上进行可靠的通信的应用程序,该模块的用途非常广泛。尝试不同的消息ID和数据有效载荷以探索其全部潜力!