

AS5600是一种高分辨率的旋转磁性位置传感器,可以测量高达360°的角度。凭借其I2C接口,可以轻松地与Raspberry Pi集成,以进行机器人,自动化和其他应用中的精确角度测量。本指南说明了如何将AS5600与Raspberry Pi一起读取角位置。
你需要什么
- 覆盆子pi (任何具有I2C支持的模型,例如PI 3,PI 4)
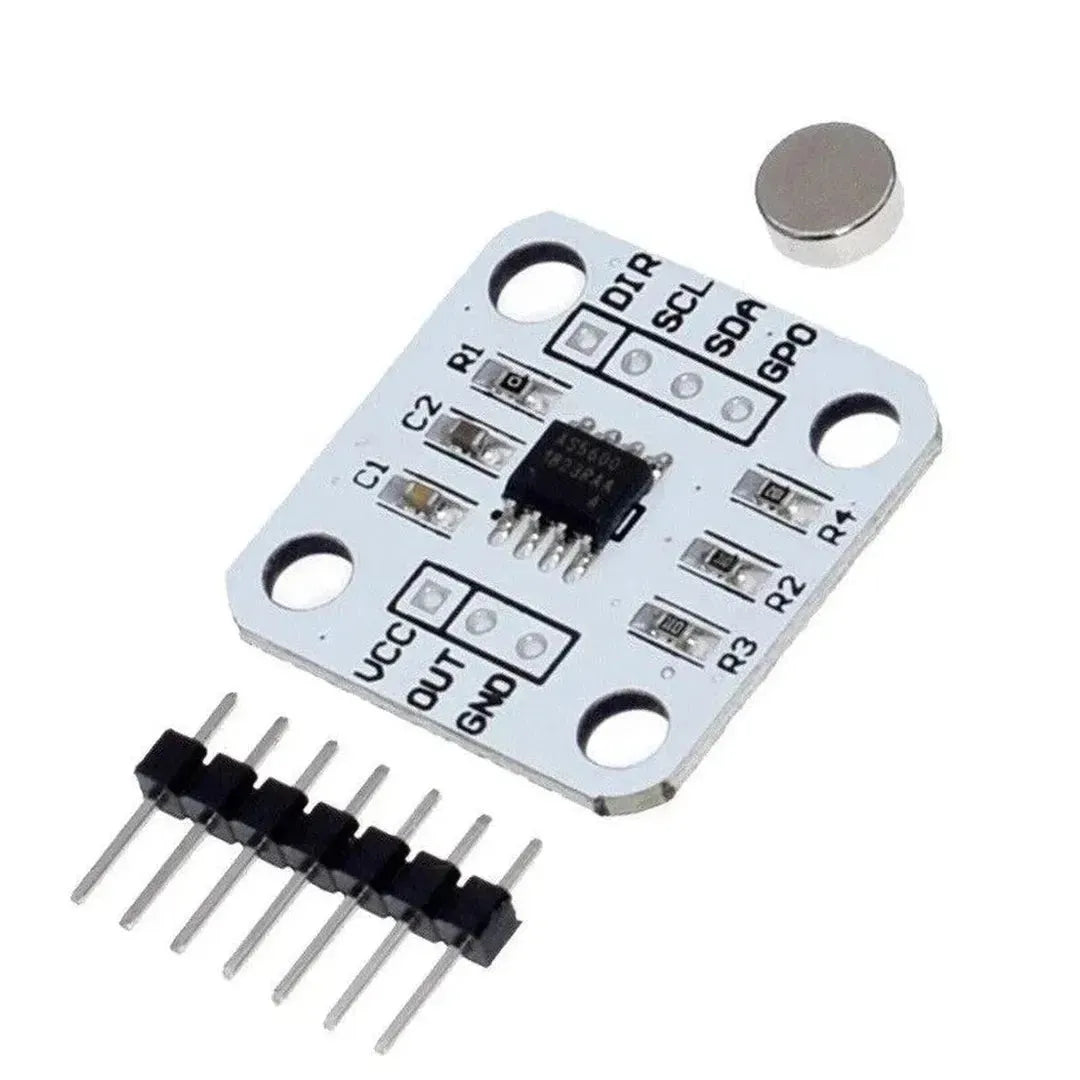
- AS5600磁性旋转编码器模块
- 磁铁 (直径磁化)
- 面包板和跳线电线
- SSH访问Raspberry Pi或连接的键盘的计算机并监视
- Python安装在Raspberry Pi上
步骤1:在Raspberry Pi上启用I2C
- 打开覆盆子Pi上的终端。
- 运行Raspberry Pi配置工具:
sudo raspi-config - 导航到 接口选项> I2C并启用它。
- 重新启动覆盆子Pi:
sudo reboot
步骤2:将AS5600接线到Raspberry Pi
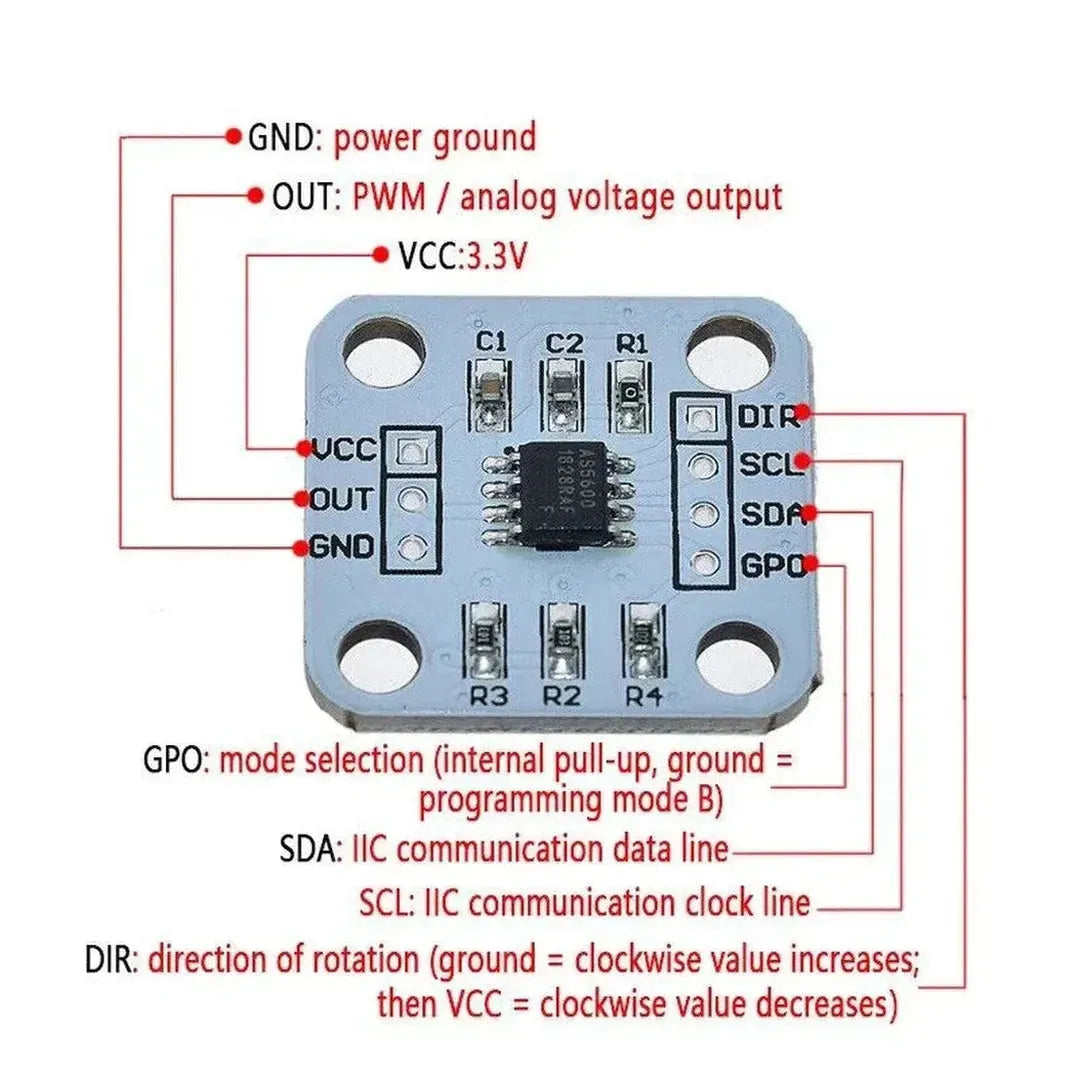
AS5600使用I2C协议进行通信。将其连接到覆盆子PI如下:
| AS5600针 | 覆盆子Pi Pin |
|---|---|
| VCC | 3.3V(引脚1) |
| gnd | 地面(引脚6) |
| SDA | SDA(引脚3,GPIO2) |
| SCL | SCL(引脚5,GPIO3) |
笔记: 确保AS5600模块的操作电压与Raspberry Pi的3.3V逻辑水平匹配。
步骤3:安装所需的工具和库
- 更新Raspberry Pi:
sudo apt update && sudo apt upgrade -y - 安装I2C工具:
sudo apt install -y i2c-tools - 安装用于I2C通信的Python库:
pip install smbus2
步骤4:验证I2C连接
- 在I2C总线上检测AS5600:
sudo i2cdetect -y 1 - 您应该看到一个设备地址(例如,
0x36)输出。如果没有,请检查您的布线。
步骤5:读取来自AS5600的数据
AS5600通过I2C提供了12位角度数据。您可以使用以下Python脚本读取和显示角位置。
Python代码示例
import smbus2
import time
# Define I2C address and bus
AS5600_ADDR = 0x36
ANGLE_REG = 0x0E
bus = smbus2.SMBus(1)
def read_angle():
# Read two bytes from the angle register
raw_data = bus.read_i2c_block_data(AS5600_ADDR, ANGLE_REG, 2)
angle = (raw_data[0] << 8) | raw_data[1] # Combine MSB and LSB
angle = angle & 0x0FFF # Mask to 12 bits
return (angle / 4096.0) * 360.0 # Convert to degrees
try:
while True:
angle = read_angle()
print(f"Angle: {angle:.2f} degrees")
time.sleep(0.5)
except KeyboardInterrupt:
print("Exiting...")
步骤6:AS5600的应用
AS5600用途广泛,可用于各种项目:
- 机器人技术: 测量关节角度或车轮角度以进行精确控制。
- 编码器: 为CNC机器或3D打印机创建DIY旋转编码器。
- 旋钮控件: 用作音量或菜单导航的高分辨率旋钮。
- 位置跟踪: 跟踪自动化系统中的角位置。
故障排除
-
未检测到设备:
- 验证SDA和SCL连接。
- 确保在Raspberry Pi上启用I2C。
- 检查AS5600的工作电压。
-
不准确的读数:
- 确保将磁铁与AS5600传感器正确对齐。
- 使用直径磁化的磁铁进行准确的测量。
-
I2C错误:
- 使用I2C总线上检查I2C总线上的冲突设备
i2cdetect. - 验证AS5600的地址与脚本匹配。
- 使用I2C总线上检查I2C总线上的冲突设备
结论
AS5600磁性旋转位置传感器是一个强大且易于使用的工具,用于测量角度。通过遵循本指南,您可以将AS5600与Raspberry Pi集成,以创建用于机器人技术,自动化等的精确旋转测量系统。尝试不同的应用程序,以解锁该多功能传感器的全部潜力!



































































































































