



28ByJ-48步进电机是经常用于DIY电子项目中的流行,负担得起的步进电机。与ULN2003驾驶员板配对,它是需要精确运动的应用,例如机器人,摄像头滑块和家庭自动化的绝佳选择。本教程将指导您使用Arduino设置和控制28ByJ-48步进电机。
你需要什么
- 28ByJ-48步进电机
- ULN2003驾驶员板
- Arduino董事会(例如Uno,Mega,Nano)
- 跳线
- 面包板(可选)
- 安装了带有Arduino IDE的计算机
步骤1:了解组件
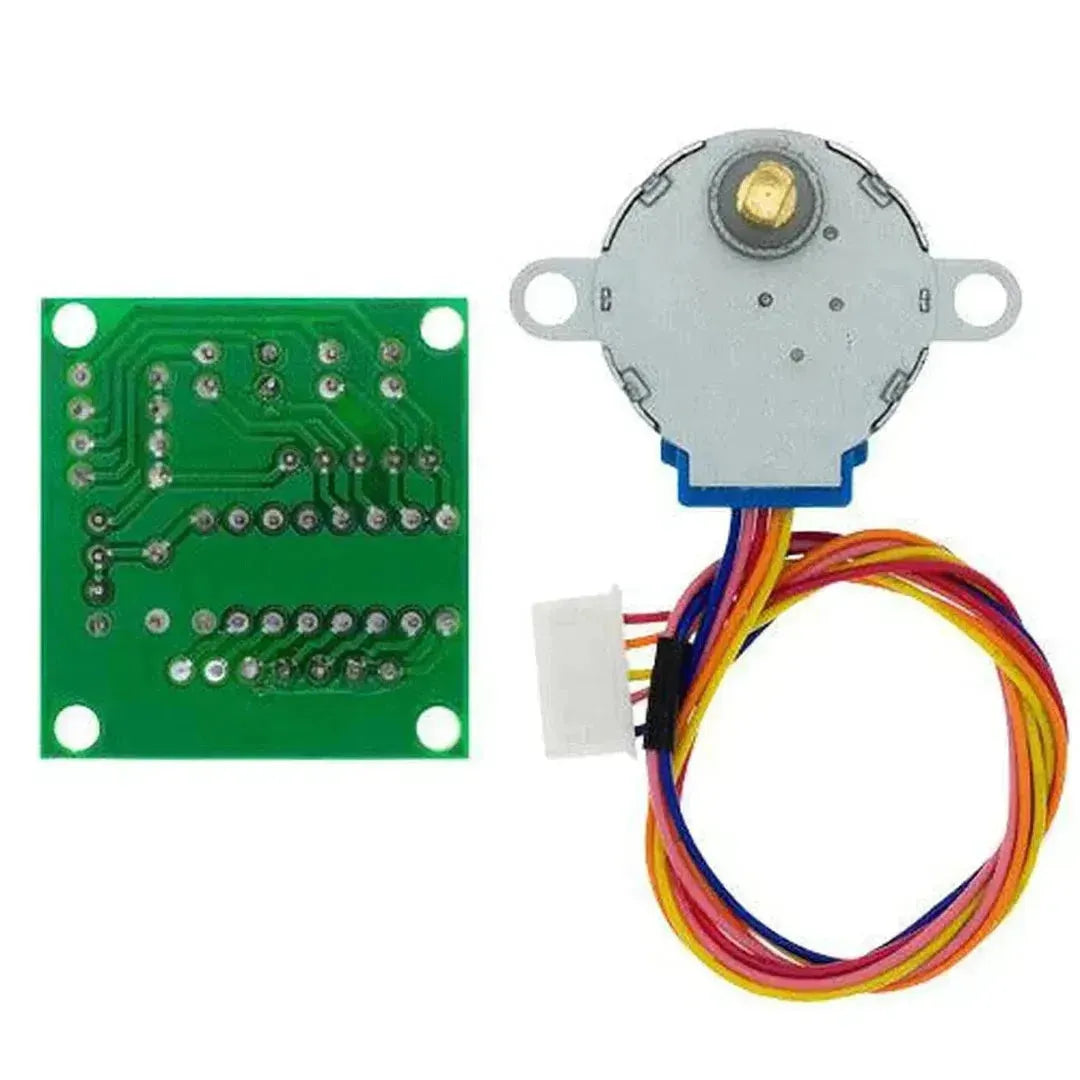
28ByJ-48步进电机
- 28BYJ-48是4相,5线步进电动机,齿轮降低比约为1:64,使其精确且可靠。
ULN2003驾驶员板
- ULN2003是专为28ByJ-48电动机设计的驾驶员板。它包括指示电动机的活动阶段的LED,并简化了与Arduino的连接。
步骤2:将ULN2003接线到Arduino
-
将28BYJ-48电动机连接到ULN2003驾驶员板。电动机的连接器直接拟合到标记为“在”板上的标题。
-
使用跳线将ULN2003驾驶员板连接到Arduino,如下所示:
| ULN2003针 | Arduino Pin |
|---|---|
| 在1 | 引脚8 |
| in2 | 引脚9 |
| in3 | 引脚10 |
| in4 | 引脚11 |
| VCC | 5V |
| gnd | gnd |
步骤3:安装步进库
Arduino IDE包括一个用于步进电机控制的内置库。
- 打开Arduino IDE。
- 去 草图 > 包括库 > 步进.
步骤4:上传代码
这是控制步进电机的基本示例代码:
#include <Stepper.h>
// Define the number of steps per revolution for the 28BYJ-48 motor
#define STEPS_PER_REV 2048
// Initialize the Stepper library on pins 8, 9, 10, and 11
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
stepper.setSpeed(15); // Set motor speed (in RPM)
Serial.begin(9600);
Serial.println("28BYJ-48 Stepper Motor Test");
}
void loop() {
Serial.println("Moving Forward");
stepper.step(STEPS_PER_REV); // Move one full revolution forward
delay(1000);
Serial.println("Moving Backward");
stepper.step(-STEPS_PER_REV); // Move one full revolution backward
delay(1000);
}
步骤5:测试设置
- 通过USB将Arduino连接到您的计算机。
- 打开Arduino IDE并选择正确的 木板 和 港口 在 工具 菜单。
- 单击将代码上传到Arduino 上传.
- 一旦上传代码,步进电机应将一场完整的革命向前旋转,然后反复向后旋转。
加速控制高级控制
对于更顺畅,更精确的控制,您可以使用 加速器 图书馆而不是内置的步进库。这是一个例子:
#include <AccelStepper.h>
// Define the motor interface type
#define HALFSTEP 8
// Initialize the AccelStepper library
AccelStepper stepper(HALFSTEP, 8, 10, 9, 11);
void setup() {
stepper.setMaxSpeed(1000); // Set maximum speed
stepper.setAcceleration(500); // Set acceleration
stepper.setSpeed(200); // Set initial speed
}
void loop() {
stepper.runSpeed(); // Continuous rotation
}
故障排除
- 电动机不移动: 检查所有连接,并确保在代码中定义正确的引脚。
- 不稳定的运动: 验证电动机的电源足够,并且代码与您的设置相匹配。
- 低扭矩: 28ByJ-48不是高音电机。确保它不会超负荷。
28ByJ-48步进电机的应用
- 相机滑块
- 机器人的武器
- 自动化的百叶窗
- 3D打印机机制
结论
您已经成功设置并控制了使用ULN2003驱动程序和Arduino的28ByJ-48步进电机。这款负担得起且可靠的电动机非常适合各种DIY项目。尝试不同的速度,步骤和控制方法,以使您的项目更加动态!