





El MCP2515 es un módulo de bus CAN (NETA DE Área del controlador) ampliamente utilizado para la comunicación automotriz e industrial. Permite a Arduino interactuar con los sistemas basados en la lata para enviar y recibir datos de manera eficiente. Este tutorial lo guiará a través de la configuración y el uso del módulo MCP2515 con Arduino.
Lo que necesitarás
- Módulo de bus MCP2515 CAN CAN
- Arduino Board (por ejemplo, Uno, Mega, Nano)
- Dispositivo compatible con el bus de cañón u otro módulo MCP2515
- Cables de jersey
- Paneles (opcional)
- Una computadora con el Arduino IDE instalado
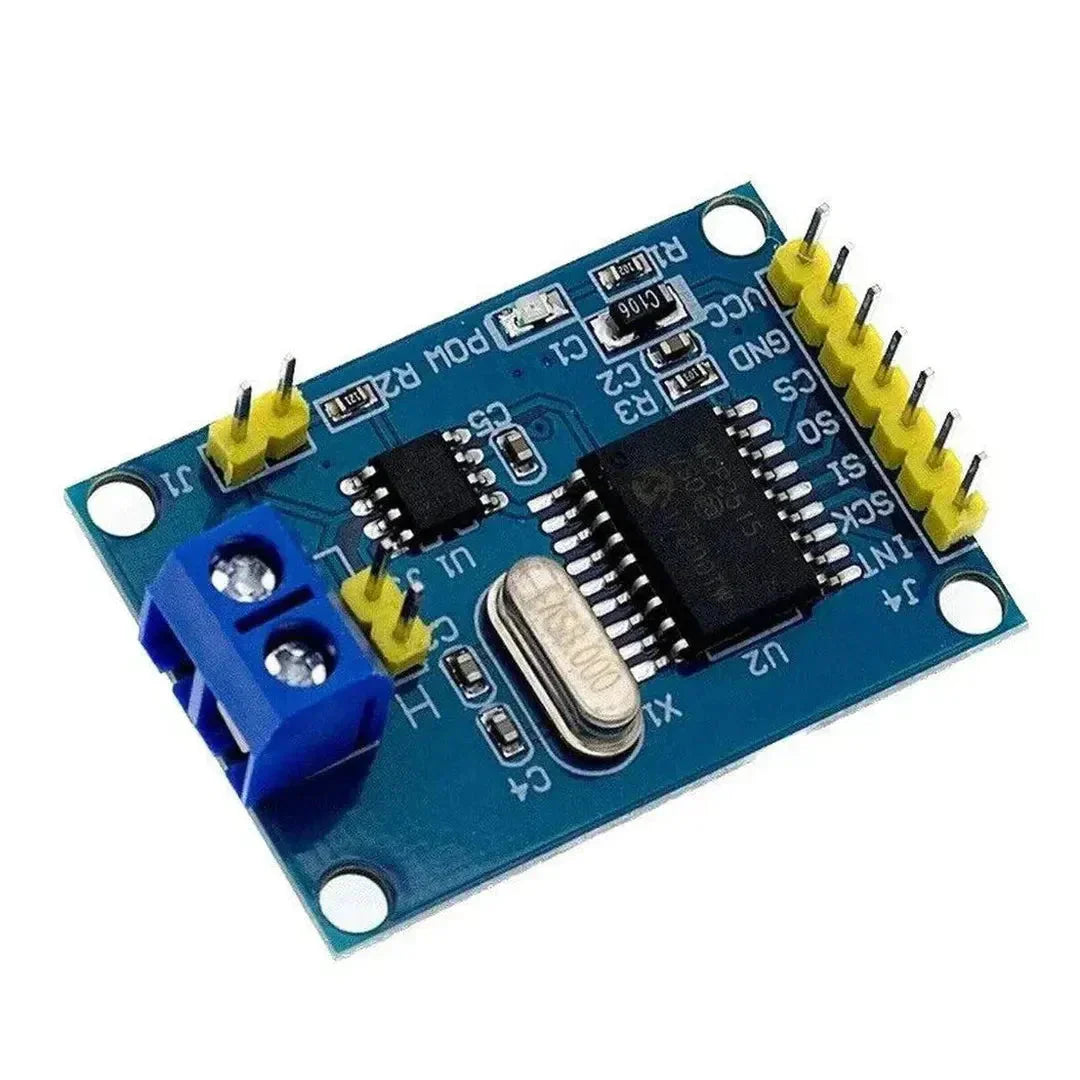
Paso 1: Comprender el módulo MCP2515
El módulo MCP2515 utiliza el controlador MCP2515 CAN CAN IC y TJA1050 CAN Transceptiver. El módulo se comunica con el Arduino a través de la interfaz SPI.
MCP2515 Pinout
| Alfiler | Función |
|---|---|
| VCC | Fuente de alimentación (5V) |
| Gnd | Suelo |
| CS | Selección de chips |
| ENTONCES | Salida de datos SPI |
| SI | Entrada de datos SPI |
| Sck | Reloj SPI |
| Intencionalmente | Interrupción de la salida |
Paso 2: Cableado el MCP2515 a Arduino
A continuación se muestra la guía de cableado para conectar el módulo MCP2515 a un Arduino Uno:
| Pin MCP2515 | Alfiler de arduino |
|---|---|
| VCC | 5V |
| Gnd | Gnd |
| CS | Pin 10 |
| ENTONCES | Pin 12 |
| SI | Pin 11 |
| Sck | Pin 13 |
| Intencionalmente | Pin 2 |
Nota: Para otros tableros Arduino, asegúrese de que los pines SPI correspondan al Pinout de su tablero específico.
Paso 3: Instale la biblioteca requerida
El Mcp_can La biblioteca simplifica la interacción con el módulo MCP2515.
Pasos para instalar la biblioteca MCP_CAN:
- Abra el IDE Arduino.
- Ir a Bosquejo > Incluir biblioteca > Administrar bibliotecas.
- Busque "mcp_can" en el administrador de la biblioteca.
- Hacer clic Instalar.
Paso 4: cargar el código
Código del transmisor (envío de datos en el bus de lata):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message Sent Successfully");
} else {
Serial.println("Error Sending Message");
}
delay(1000); // Send data every second
}
Código receptor (lectura de datos del bus de lata):
#include <SPI.h>
#include <mcp_can.h>
#define CAN_CS 10
MCP_CAN CAN(CAN_CS); // Set CS pin for MCP2515
void setup() {
Serial.begin(115200);
if (CAN.begin(MCP_ANY, 500000, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully");
} else {
Serial.println("CAN Bus Initialization Failed");
while (1);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN Bus set to Normal Mode");
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if (CAN.checkReceive() == CAN_MSGAVAIL) {
CAN.readMsgBuf(&len, buf);
unsigned long id = CAN.getCanId();
Serial.print("Message ID: 0x");
Serial.println(id, HEX);
Serial.print("Data: ");
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Paso 5: prueba la configuración
- Conecte el módulo MCP2515 a su Arduino como se describe en el Paso 2.
- Cargue el código del transmisor a un Arduino y el código del receptor a otro Arduino.
- Conecte los pines Can_H y Can_L de ambos módulos MCP2515 para establecer el bus CAN.
- Abra el monitor en serie en ambos Arduinos y establezca la velocidad de baudios para
115200. - En el receptor Arduino, debería ver los mensajes enviados por el transmisor Arduino.
Solución de problemas
- No se reciben datos: Verifique las conexiones CAN_H y CAN_L entre los módulos.
- La inicialización falló: Asegúrese de que las conexiones SPI y el pin CS coincidan con su configuración.
- Comunicación errática: Verifique que ambos módulos usen la misma velocidad de baudios (500 kbps en este ejemplo).
Aplicaciones del módulo de bus MCP2515 Can Bus
- Diagnóstico de vehículos (OBD-II)
- Sistemas de automatización industrial
- Comunicación robótica
- Dispositivos de IoT con redes de bus CAN
Conclusión
Ha configurado con éxito el módulo MCP2515 Can Bus con Arduino para enviar y recibir datos. Este módulo es increíblemente versátil para aplicaciones que requieren una comunicación confiable sobre un bus de lata. ¡Experimente con diferentes ID de mensaje y cargas útiles de datos para explorar todo su potencial!



































































































































